位置決め精度について 投稿者:レオンハルト 投稿日:2020/07/29(Wed) 23:11 No.1510
こんばんは。kowさんのホームページを元に中華フライスをcnc化しました。
フライス盤はxj9512(中華フライス)で、ボールネジも中華製の1605を購入しました。ベアリングホルダー関連は全てkowさんの仕樣を元に作成しています。つまりアンギュラベアリングを向かい合わせてm12のネジでバックラッシュを取って…っと言う具合です。
制御はArduino(GRBL)で行っています。
本題に入りますが、x軸の端面にダイヤルゲージを当てて位置決め精度を確認した所、
G1X0.05→動かない
G1X0.1→0.05
G1X0.15→0.1
G1x0.2→0.15
…
というように、最初の移動が動かずその次の移動から正常に動き出します。
それと、0.01などの細かい指令については動きません。
ステッピングモーターは200ステップで8分割にしてあります。
原因は何でしょうか?
この度初めて機械の改造に挑戦したので、分からないことだらけです。
どうかご教示お願いします。
Re: 位置決め精度について - レオンハルト 2020/07/31(Fri) 13:49 No.1511
あれから色々考えて、まずバックラッシュの追い込みをもう少しキツめに調整してみました。
その上で、パルスの分割を8分割から4分割に下げてトルクアップもしました。
Z軸においては2分割にしました。
その結果、ダイヤルゲージで計測したところ、全ての軸がほぼデータ通りに動作するようになりました。
ですが、あくまでこれは空運転での数値なので実際に削るとまた何か不具合が出るかも知れません。
その時はまた質問させて頂きますので宜しくお願いします。
その上で、パルスの分割を8分割から4分割に下げてトルクアップもしました。
Z軸においては2分割にしました。
その結果、ダイヤルゲージで計測したところ、全ての軸がほぼデータ通りに動作するようになりました。
ですが、あくまでこれは空運転での数値なので実際に削るとまた何か不具合が出るかも知れません。
その時はまた質問させて頂きますので宜しくお願いします。
Re: 位置決め精度について - Kow 2020/07/31(Fri) 20:47 No.1512
レオンハルトさん、こんにちは。
>最初の移動が動かず
が、
①モーターは動いているのにテーブルは動かない
②モーターが動かない
なのか、どちらかがキモとなります。①であればベアリングホルダの調整の問題ですし、②であればモータートルクの問題となります。
マイクロステップを1/8→1/4にして動いたということは②なのだと思います。しかし、実際にワークを載せて削るとさらに抵抗は増えます
ので、脱調が怖いですね・・・。モーターの仕様書を見て電力を調整するとトルクを改善できる可能性があります。
今私は脱調対策の根本策としてあり溝をやめてリニアガイドを使用すべくフライスを自作中です。脱調するとホントにがっくりしますので・・・
頑張ってください、また不明点ありましたら是非ご投稿ください。
>最初の移動が動かず
が、
①モーターは動いているのにテーブルは動かない
②モーターが動かない
なのか、どちらかがキモとなります。①であればベアリングホルダの調整の問題ですし、②であればモータートルクの問題となります。
マイクロステップを1/8→1/4にして動いたということは②なのだと思います。しかし、実際にワークを載せて削るとさらに抵抗は増えます
ので、脱調が怖いですね・・・。モーターの仕様書を見て電力を調整するとトルクを改善できる可能性があります。
今私は脱調対策の根本策としてあり溝をやめてリニアガイドを使用すべくフライスを自作中です。脱調するとホントにがっくりしますので・・・
頑張ってください、また不明点ありましたら是非ご投稿ください。

Re: 位置決め精度について - レオンハルト 2020/08/04(Tue) 11:54 No.1513
Kowさん返信ありがとうございます。
Z軸はモーターのパワー不足もあり、1/4で脱調する事があったのでとりあえず1/2にして対策しています。
X、Y軸に関しては1/8でも脱調しませんでしたが、無負荷状態でしたので余裕を持って1/4にしてみました。
まだ負荷が少ない切削しかしてないので、この先不具合が出るかも知れません。
リニアガイド良いですね!
いつかは挑戦してみたいです。
Z軸はモーターのパワー不足もあり、1/4で脱調する事があったのでとりあえず1/2にして対策しています。
X、Y軸に関しては1/8でも脱調しませんでしたが、無負荷状態でしたので余裕を持って1/4にしてみました。
まだ負荷が少ない切削しかしてないので、この先不具合が出るかも知れません。
リニアガイド良いですね!
いつかは挑戦してみたいです。
Re: 位置決め精度について - OKA 2020/08/06(Thu) 10:05 No.1514
レオンハルトさん こんにちは。
おなじく現在、arduino(grbl)からCNC製作を目指いして奮闘しております、OKAですmmお仲間発見です(笑)
arduinoから動かすのに、CNCシールドをお使いですか? ステッピングモータの仕様が分かれば、経験から
少しはアドバイスできるかも知れません・・・。
42mm角のステッピングモータかなぁ?と思いますが、こちらも見た目が同じでも仕様がだいぶん色々ある
様で。。。
差支えなければ、私の勉強にもなりますので、仕様(使っているモータとドライバ)を教えて頂けないでしょうか?
おなじく現在、arduino(grbl)からCNC製作を目指いして奮闘しております、OKAですmmお仲間発見です(笑)
arduinoから動かすのに、CNCシールドをお使いですか? ステッピングモータの仕様が分かれば、経験から
少しはアドバイスできるかも知れません・・・。
42mm角のステッピングモータかなぁ?と思いますが、こちらも見た目が同じでも仕様がだいぶん色々ある
様で。。。
差支えなければ、私の勉強にもなりますので、仕様(使っているモータとドライバ)を教えて頂けないでしょうか?
Re: 位置決め精度について - レオンハルト 2020/08/08(Sat) 00:44 No.1515
OKAさん返信ありがとうございます。
モータードライバーはTB6600を使用しています。
ステッピングモーターは56mm角です。xyは同じ2Aですが、z軸は脱調気味だったので3Aステッピングモーターを購入して変更しました。
ですがしかし…
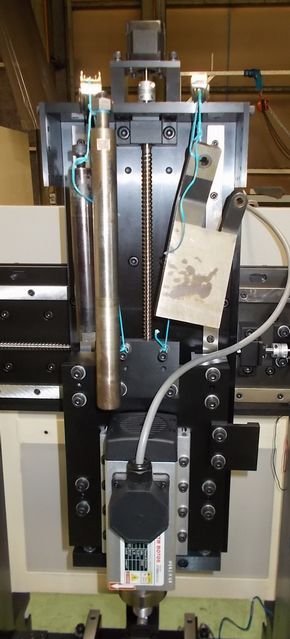
3Aステッピングモーターに変更してもz軸はガススプリングを付けているせいか、ガススプリングが伸びている状態(z軸上部)はすんなり動くのですが、最も縮んだ状態になる手前100ミリ辺りから脱調気味になる事が分かりました。
恐らくガススプリングが垂直に取り付いて無いためなのではないかと思います。
現在は単にネジで固定してあるだけなので、ボールジョイントを早速注文してみました。
それと、Arduino(GRBL)だとバックラッシュを吸収する機能がないのですが、どうされてますか?
モータードライバーはTB6600を使用しています。
ステッピングモーターは56mm角です。xyは同じ2Aですが、z軸は脱調気味だったので3Aステッピングモーターを購入して変更しました。
ですがしかし…
3Aステッピングモーターに変更してもz軸はガススプリングを付けているせいか、ガススプリングが伸びている状態(z軸上部)はすんなり動くのですが、最も縮んだ状態になる手前100ミリ辺りから脱調気味になる事が分かりました。
恐らくガススプリングが垂直に取り付いて無いためなのではないかと思います。
現在は単にネジで固定してあるだけなので、ボールジョイントを早速注文してみました。
それと、Arduino(GRBL)だとバックラッシュを吸収する機能がないのですが、どうされてますか?
Re: 位置決め精度について - OKA 2020/08/17(Mon) 10:23 No.1516
レオンハルトさん
こんにちは。
TB6600を使っておられるんですね。56□の3Aだと、結構パワーはありそうですね!
改めてkowさんのHPを拝見しました。私には、こんな自作を出来る技術が無いので、既製品を購入してしまいました苦笑
質問ばかりなのですが、、、ガススプリング?はどのような目的でどこについているのですか‥?ボールネジと平行に
取り付けてあるのでしょうか?自重落下防止?
無負荷状態で動かして、あるポイントで脱調するとなると、レールとボールネジの平行なども怪しいのかなぁ?と思ったり
します。
自作で素敵なものを作っておられる方に偉そうに言えませんが、色々問題があって、何が悪いのかわからなくなってしまった
ので、既製品を買ってしまいました。無知だったので、安物を買いあさるより、大事なところにはお金をかけた方が、結果安いかとw
ボールネジ MISUMI C-BSSH 1205-440
レール MISUMI SSE2B20-580
ベアリングホルダ MISUMI BSWR10-SET
モータは、42mm角からスタートして、やっぱり脱調で苦しみまして、、サーボは手が出なかったので、オリエンタルモータの
AZM69シリーズにしました。ブレーキと位置検出(エンコーダ内臓)です。トルク特性は違いますが、サーボに近い性能です。
一応、鉄も削ってみましたが、今のところ脱調や過負荷などは見られません。ボールネジも予圧タイプで、バックラッシもほぼ
無い状態です。
すみません、あまり参考になりそうな事ありませんが、僕の場合は、切り返しや動き出し時に良く脱調して、加速を緩くしたり
して調整しました。ソフトはbCNCを使っています。ちなみにラズパイから動かしています。
動画をUPさせてただこうかと思ったのですが、どうしても容量オーバーでした^^;
こんな感じの知識しかないですが、何かあれば聞いてください。がんばってください~
こんにちは。
TB6600を使っておられるんですね。56□の3Aだと、結構パワーはありそうですね!
改めてkowさんのHPを拝見しました。私には、こんな自作を出来る技術が無いので、既製品を購入してしまいました苦笑
質問ばかりなのですが、、、ガススプリング?はどのような目的でどこについているのですか‥?ボールネジと平行に
取り付けてあるのでしょうか?自重落下防止?
無負荷状態で動かして、あるポイントで脱調するとなると、レールとボールネジの平行なども怪しいのかなぁ?と思ったり
します。
自作で素敵なものを作っておられる方に偉そうに言えませんが、色々問題があって、何が悪いのかわからなくなってしまった
ので、既製品を買ってしまいました。無知だったので、安物を買いあさるより、大事なところにはお金をかけた方が、結果安いかとw
ボールネジ MISUMI C-BSSH 1205-440
レール MISUMI SSE2B20-580
ベアリングホルダ MISUMI BSWR10-SET
モータは、42mm角からスタートして、やっぱり脱調で苦しみまして、、サーボは手が出なかったので、オリエンタルモータの
AZM69シリーズにしました。ブレーキと位置検出(エンコーダ内臓)です。トルク特性は違いますが、サーボに近い性能です。
一応、鉄も削ってみましたが、今のところ脱調や過負荷などは見られません。ボールネジも予圧タイプで、バックラッシもほぼ
無い状態です。
すみません、あまり参考になりそうな事ありませんが、僕の場合は、切り返しや動き出し時に良く脱調して、加速を緩くしたり
して調整しました。ソフトはbCNCを使っています。ちなみにラズパイから動かしています。
動画をUPさせてただこうかと思ったのですが、どうしても容量オーバーでした^^;
こんな感じの知識しかないですが、何かあれば聞いてください。がんばってください~
Re: 位置決め精度について - Kow 2020/08/17(Mon) 15:25 No.1517
ガススプリングの位置で動作が変わるというのは気になりますね。
私の一時期ガススプリングを検討したことがあったのですが、ボールねじを入れて試したところ8.5kgの三相モーターを
ヘッドに取り付けてあるにも関わらず問題がなかったため採用しませんでした。
CNCで使うときは待機電流(でしたっけ)を多めに入れておくことで自重による位置ずれを防止できます。
(手動で動かすときはダメです、ズレて落ちてきます)
動画のアップはゴメンナサイ、借りているサーバの容量も問題で限界がありますので、Youtube等にアップして頂き
リンクを張って頂けると助かります。お手数をお掛けいたしますがよろしくお願い致します。
私の一時期ガススプリングを検討したことがあったのですが、ボールねじを入れて試したところ8.5kgの三相モーターを
ヘッドに取り付けてあるにも関わらず問題がなかったため採用しませんでした。
CNCで使うときは待機電流(でしたっけ)を多めに入れておくことで自重による位置ずれを防止できます。
(手動で動かすときはダメです、ズレて落ちてきます)
動画のアップはゴメンナサイ、借りているサーバの容量も問題で限界がありますので、Youtube等にアップして頂き
リンクを張って頂けると助かります。お手数をお掛けいたしますがよろしくお願い致します。
Re: 位置決め精度について - OKA 2020/08/17(Mon) 17:30 No.1518
私の勉強不足かも知れないのですが、arduino(grbl) で動かすのに、大気電流?をかけ続けることが出来なくて、
どうしてもプログラムENDでZ軸がズレてしまっていました。動作中は、角42mmでも動くには動いたんですが。
小倉クラッチの無励磁作動ブレーキ(保持・非常停止用)、なるものがあるので、これを取り付けようかと検討していました。
停止時にブレーキがかかるものですね。
が、脱調時に即時停止させたいことから、高かったですけどオリエンタルモータのAZシリーズにした感じです。
>kowさん
動画の件、了解です。arduinoとラズパイで、Gコード動作することが出来ましたので、また出来ればリンクを貼らせて
頂きます。ありがとうございます。
どうしてもプログラムENDでZ軸がズレてしまっていました。動作中は、角42mmでも動くには動いたんですが。
小倉クラッチの無励磁作動ブレーキ(保持・非常停止用)、なるものがあるので、これを取り付けようかと検討していました。
停止時にブレーキがかかるものですね。
が、脱調時に即時停止させたいことから、高かったですけどオリエンタルモータのAZシリーズにした感じです。
>kowさん
動画の件、了解です。arduinoとラズパイで、Gコード動作することが出来ましたので、また出来ればリンクを貼らせて
頂きます。ありがとうございます。
Re: 位置決め精度について - Kow 2020/08/17(Mon) 18:28 No.1519
grblでざっと検索してネットあさってみましたが、電流量はボリュームで調整するのですね。
そこで調整できる電流はドライブ電流なのでしょうが、スリープ電流は設定できないのかな?(そもそもスリープしないのか?)
私はオリジナルマインドのQUATTRO-1というCNC基盤を使用していますが、これはドライブ電流と別にスリープ電流(軸停止時の待機電流)
を指定できるので、それを上げることで対処していました。
思い付きというか、当時私が考えたバカげたアイディアですが主軸コラムのトップに滑車を置いて、釣り合いを取る重りをぶら下げ
ようかと考えたこともあります。どうしてもガススプリングだと抵抗と動作ムラが気になったのでそんなことを考えたことも・・・
そこで調整できる電流はドライブ電流なのでしょうが、スリープ電流は設定できないのかな?(そもそもスリープしないのか?)
私はオリジナルマインドのQUATTRO-1というCNC基盤を使用していますが、これはドライブ電流と別にスリープ電流(軸停止時の待機電流)
を指定できるので、それを上げることで対処していました。
思い付きというか、当時私が考えたバカげたアイディアですが主軸コラムのトップに滑車を置いて、釣り合いを取る重りをぶら下げ
ようかと考えたこともあります。どうしてもガススプリングだと抵抗と動作ムラが気になったのでそんなことを考えたことも・・・
Re: 位置決め精度について - レオンハルト 2020/08/18(Tue) 00:48 No.1521
OKAさんKOWさん返信ありがとうございます。
ガススプリングの平行を改善してみましたがあまり効果がありませんでした。
ガススプリングの位置はボールネジがz軸コラムの右側に対して左側に取り付けてあります。
まずガススプリングは現在20kgのものを使用しています。
(とりあえず家にあるもので使用しました)
モーターを手動ハンドルで動かすと下に回すほうが重たいので10kgか15kgが良いと思うのですが、長さが丁度良いのが15kgしかなかったのでとりあえず15kgを注文してみました。
ちなみにガススプリングを付けないと20kgを付けている時以上に脱調しやすくなります。(手動ハンドルを回すとかなり重たいです)
コラムとボールネジの平行はZ軸に関してはとても平行出しが難しいです。
この機械より大きな機械でもあれば平行に削ったりノックピンの穴を開けたりすれば取り付けは簡単になるんでしょうけど。
KOWさんはどのようにして平行出ししていますか?
自分はz軸を下に下げた状態と上に上げた状態の両方でボールネジがベアリングの穴(m12ネジと同芯に加工した穴)にすんなり収まる位置になるよう調整して取り付けました。
以上のことから対策を考えたところ、
①ガススプリングを15Kgにする
②Z軸のモーターを現在3Aで保持トルク1.8Nのものから3Aで保持トルク3Nのものに変更する
この2点を実行してみようと思います。
もしこれでも脱調するようなら、プーリー比3:1程度でタイミングプーリーにしたほうが良いでしょうか?
でもそうすると更にバックラッシュで悩まされる事になるかもしれませんね。
GRBLにはバックラッシュ機能がないのでmach3の導入も検討しています。
ガススプリングの平行を改善してみましたがあまり効果がありませんでした。
ガススプリングの位置はボールネジがz軸コラムの右側に対して左側に取り付けてあります。
まずガススプリングは現在20kgのものを使用しています。
(とりあえず家にあるもので使用しました)
モーターを手動ハンドルで動かすと下に回すほうが重たいので10kgか15kgが良いと思うのですが、長さが丁度良いのが15kgしかなかったのでとりあえず15kgを注文してみました。
ちなみにガススプリングを付けないと20kgを付けている時以上に脱調しやすくなります。(手動ハンドルを回すとかなり重たいです)
コラムとボールネジの平行はZ軸に関してはとても平行出しが難しいです。
この機械より大きな機械でもあれば平行に削ったりノックピンの穴を開けたりすれば取り付けは簡単になるんでしょうけど。
KOWさんはどのようにして平行出ししていますか?
自分はz軸を下に下げた状態と上に上げた状態の両方でボールネジがベアリングの穴(m12ネジと同芯に加工した穴)にすんなり収まる位置になるよう調整して取り付けました。
以上のことから対策を考えたところ、
①ガススプリングを15Kgにする
②Z軸のモーターを現在3Aで保持トルク1.8Nのものから3Aで保持トルク3Nのものに変更する
この2点を実行してみようと思います。
もしこれでも脱調するようなら、プーリー比3:1程度でタイミングプーリーにしたほうが良いでしょうか?
でもそうすると更にバックラッシュで悩まされる事になるかもしれませんね。
GRBLにはバックラッシュ機能がないのでmach3の導入も検討しています。
Re: 位置決め精度について - OKA 2020/08/18(Tue) 08:30 No.1522
kowさん
つり合い重りを付ける、バカなアイデア・・・・いやいや、実際にやってしまいました(笑)まだまだ重りは足りないですが、
これくらいで□42mmで、無負荷ならなんとか動きました。でも、急発進はダメでしたので、だいぶ加速もゆっくりにして。
ばねとか、色々考えましたが少しでも抵抗を減らそうとすると、バランサになってしまいましたw あくまでテストですが。
TB6600のドライバを使用されているので、おそらく、電流値はドライバ任せで、arduinoからはパルス信号をもらっているだけ、
という状態と思います。arduinoのオプションのドライバを使うときは、抵抗値のボリュームで電流を合わせないとモータが
焼けたり、パワー不足で即脱調、など起こります。レオンハルトさんの場合は、ドライバを使っているのでそこは大丈夫かと。
つり合い重りを付ける、バカなアイデア・・・・いやいや、実際にやってしまいました(笑)まだまだ重りは足りないですが、
これくらいで□42mmで、無負荷ならなんとか動きました。でも、急発進はダメでしたので、だいぶ加速もゆっくりにして。
ばねとか、色々考えましたが少しでも抵抗を減らそうとすると、バランサになってしまいましたw あくまでテストですが。
TB6600のドライバを使用されているので、おそらく、電流値はドライバ任せで、arduinoからはパルス信号をもらっているだけ、
という状態と思います。arduinoのオプションのドライバを使うときは、抵抗値のボリュームで電流を合わせないとモータが
焼けたり、パワー不足で即脱調、など起こります。レオンハルトさんの場合は、ドライバを使っているのでそこは大丈夫かと。
Re: 位置決め精度について - Kow 2020/08/18(Tue) 16:26 No.1524
>コラムとボールネジの平行はZ軸に関してはとても平行出しが難しいです。
>この機械より大きな機械でもあれば平行に削ったりノックピンの穴を開けたりすれば取り付けは簡単になるんでしょうけど。
>KOWさんはどのようにして平行出ししていますか?
特に変わったことはしていません、ノギスで計測して仮止めして、あとは上下に動かしつつ様子をみて・・・です。
>つり合い重りを付ける、バカなアイデア・・・・いやいや、実際にやってしまいました(笑)
た、大変失礼致しましたっ!
慣性力が付くので加速は落とさないとこれはこれで厳しそうですね。それでも実行力に感服!です
>この機械より大きな機械でもあれば平行に削ったりノックピンの穴を開けたりすれば取り付けは簡単になるんでしょうけど。
>KOWさんはどのようにして平行出ししていますか?
特に変わったことはしていません、ノギスで計測して仮止めして、あとは上下に動かしつつ様子をみて・・・です。
>つり合い重りを付ける、バカなアイデア・・・・いやいや、実際にやってしまいました(笑)
た、大変失礼致しましたっ!
慣性力が付くので加速は落とさないとこれはこれで厳しそうですね。それでも実行力に感服!です
Re: 位置決め精度について - レオンハルト 2020/08/18(Tue) 21:24 No.1525
KOWさんOKAさん返信ありがとうございます。
本日、3A,3Nステッピングモーターが届きました。
早速取り付けましたが今の所良い感じです。
しかしながら、やはりガススプリングはもう少し軽めにしたほうが良いようです。
ですがKOWさんOKAさんが言っておられるように、主軸ヘッドと同じ重さのバランサーを取り付けるのが1番良いかも知れません。
Arduinoの指令通りには一応動いているようです。
後は機械の方を調整して、バックラッシュを吸収できるソフトに変更すれば、そこそこの精度が出せるのではないかと期待しています。
本日、3A,3Nステッピングモーターが届きました。
早速取り付けましたが今の所良い感じです。
しかしながら、やはりガススプリングはもう少し軽めにしたほうが良いようです。
ですがKOWさんOKAさんが言っておられるように、主軸ヘッドと同じ重さのバランサーを取り付けるのが1番良いかも知れません。
Arduinoの指令通りには一応動いているようです。
後は機械の方を調整して、バックラッシュを吸収できるソフトに変更すれば、そこそこの精度が出せるのではないかと期待しています。